
Emre Girgin
Ph.D. Student / Research Assistant
Education
Ph.D. in Aerospace Engineering
Embry-Riddle Aeronautical University [2025–Present]
M.Sc. in Computer Engineering
Bogazici University [2021–2024]
B.Sc. in Computer Engineering
Bogazici University [2016–2021]
Experience
Robotics Researcher
TUBITAK BILGEM [2021–2024]
Publications
Learning Rock Pushability on Rough Planetary Terrain
International Conference on Robotics and Automation (ICRA) - Workshop on Field Robotics, 2025.
EdgeAI Drone for Autonomous Construction Site Demonstrator
International Conference on Robotics and Automation (ICRA) - Workshop on Future of Construction, 2025.
Detection and Quantification of Occlusion for 3D Human Pose and Shape Estimation
International Conference on Pattern Recognition (ICPR) - Workshop on FBE, 2024.
Bidirectional Human Interactive AI Framework for Social Robot Navigation
International Conference on Robotics and Automation (ICRA) - Workshop on RTSS, 2024.
IEEE Signal Processing and Communications Applications Conference (SIU), 2023.
IEEE Intelligent Vehicles Symposium (IV), 2022.
Selected Projects
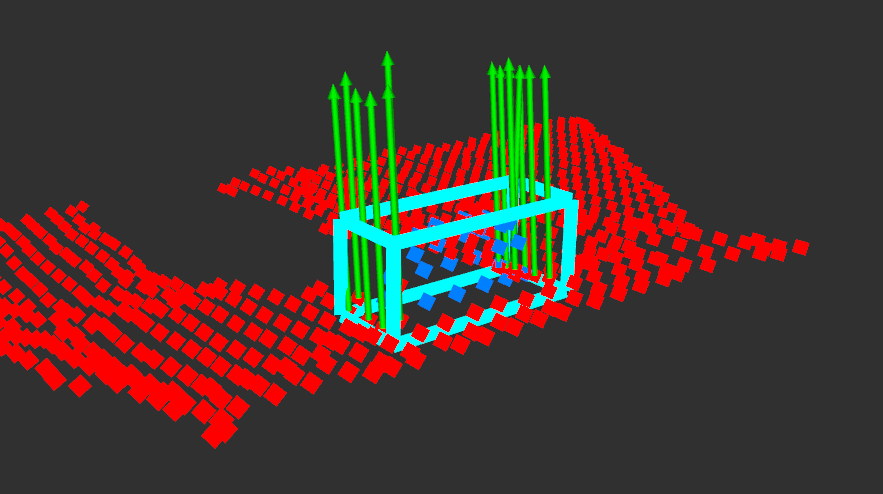
Point Cloud Based Rock Segmentation (2025)
A ROS2 package to segment rocks and extract surface characteristics. (ICRA'25)

Occlusion Index (2024)
Occlusion quantification tool for 3D Human Pose and Shape (HPS) Estimation datasets. Master Thesis

Saliency Map Based Adversarial Attack (2022)
A scoring-based black-box attack written in PyTorch that forms adversarial images by optimizing the network's confidence level with guidance from a saliency map.
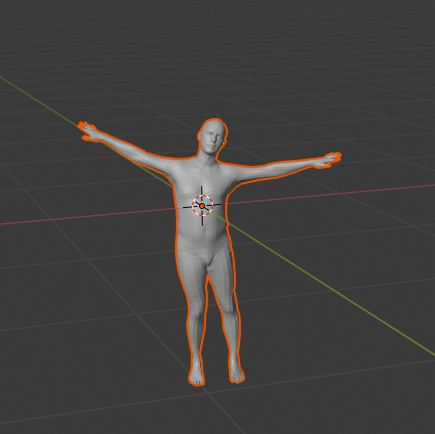
SMPL Rendering using Blender (2022)
Example pipeline to load and render SMPL models using the Blender API.

Adversarial Robustness by Latent Code Composition (2021)
A PyTorch-based pipeline to improve the robustness of image classification models. It composes the latent code of original and attacked samples during adversarial training via an AugMix-like algorithm. (BSc Senior Project)

Detectron2 for Lane Segmentation (2021)
Using the Detectron2 API's Faster R-CNN pipeline for lane segmentation on the Berkeley Deep Drive 100K dataset.
Tutorials & Documents
Blog
I occasionally write about topics in robotics and computer vision or simply life.
Travel Notes